





















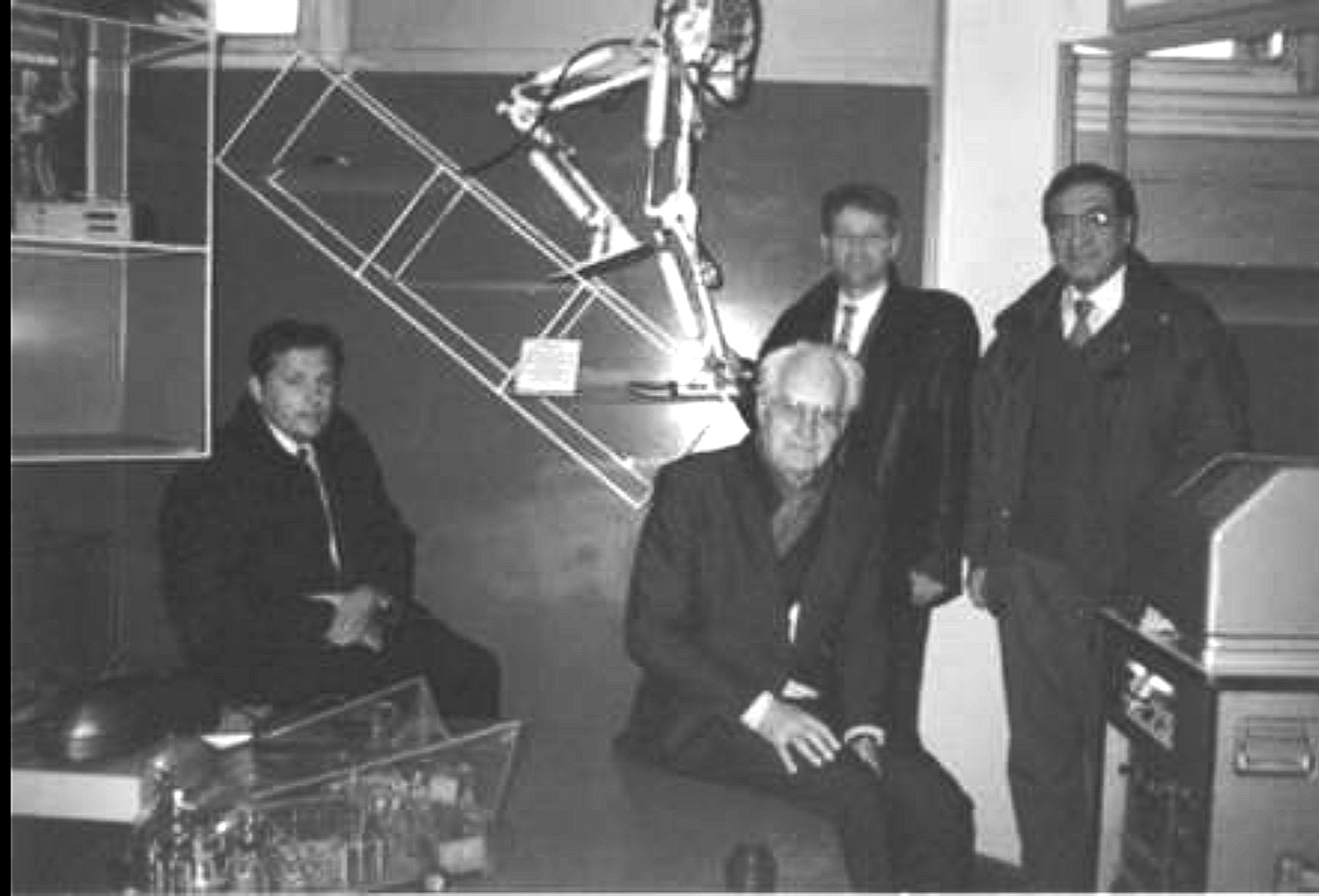
Na institutu ,,Mihajlo Pupin” osnovana je još davne 1967. godine prva laboratorija za robotiku u Jugoslaviji, i prva u jugoistočnoj Evropi. Kolika joj je bila važnost svedoči i činjenica da se i danas globalno smatra začetnicom razvoja robotike u svetu.

Osnivanju ove laboratorije prethodio je rad profesora Rajka Tomovića , na robotskoj ruci tj. ,,Beogradskoj šaci” 1963. godine.

Prva robotska šaka sa pet prstiju kreirana je 1968. godine i postala je prva u svetu protetička robotska šaka koju je pokretao jedan DC monitor, omogućavajući funkciju kretanja prstiju. U našoj zemlji nije upotrebljavana u kliničke shrhe, ali je korišćena za istraživanja koja su uticala na dalji razvoj egzoskeleta.
Jedan od osnivača laboratorije, akademik prof. Miomir Vukobratović , autor je teorije Tačke nultog momenta (1968) iz oblasti matematičkog modelovanja antropomorfnih aktivnih mehanizama.
Ova teorija je dala ogroman doprinos sigurnom kretanju humanoidnih robota, koji će se tek kasnije pojaviti. Na njegovom teorijskom modelu se i dan danas zasniva kretanje svih vrsta androida u svetu.
Vukobratović je bio jedan od rodonačelnika robotike koji je vodio beogradsku školu robotike. Njegovo najznačajnije istraživanje i ujedno najvažniji korak u razvoju škole robotike bio je rad o tački nula momenta koji je objavljen 1969. godine.
Pre nego što je njegov model kretanja počeo da se primenjuje, roboti su imali veliki problem sa održavanjem ravnoteže u pokretu.
Kako ne bi pao i kako bi pri kretanju održao ravnotežu, bilo je potrebno da se njegov sistem tako reguliše da stalno izračunava sile i vrši popravke grešaka. Kao i na stopalu čoveka, tako i kod robota postoji tačka gde je momenat svih sila nula.

Čim vrednost momenta postane veća od nule, potrebno je regulisati tu vrednost povratnom spregom i tako održati robota u ravnoteži. On je utvrdio da bi robot mogao da se kreće skoro kao čovek, potrebno je oko 350 motora, a samo jedan ima masu 250 grama.
Zahvaljujući njegovoj teoriji, u laboratoriji za robotiku Instituta ,,Mihajlo Pupin” je 1969. godine napravljen je i prvi veštački korak sa aktivnim egzoskeletom pod njegovim patronatom.
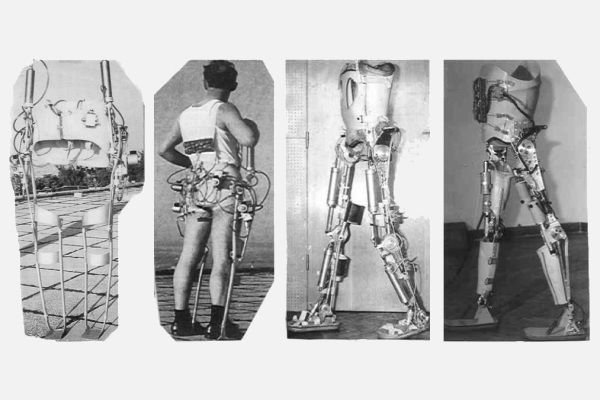
Ova mašina služila je kao osnovni pokretač za paraplegičare, tako što je nadoknađivala 50 odsto sile potrebne za pokretanje tela.
Upotrebljivi prototipi egzoskeleta napravljeni su tek 1974. godine kao kompletni uređaji od čvrstog materijala snabdeveni kompletno elektropneumatskim i elektromehaničkim motorima. Težina im je bila oko 12 kilograma, a koristili su ga nepokretni pacijenti.
Ovaj prvi egzoskelet Beogradske škole robotike je vrlo važan doprinos za istoriju svetske robotike i rehabilitaciju velikog broja pacijenata.
Sledeće godine su se istraživanja nastavila na Institutu u laboratoriji za biodinamiku i usmerena su ka industrijskoj robotici.
Tako je na Institutu 1978. godine napravljen prvi industrijski robot u laboratoriji. Imao je antropomorfnu konfiguraciju, prvi na svetu, koji je korišćen u fabrici Teleoptik za kalibrciju termostata za automobile. Sledećih godina razvijeni su novi modeli aktivnih skeleta, kao i cela ortopedska ruka za distrofičare.
Sve ono što je do kraja osamdesetih urađeno na Institutu ,,Mihajlo Pupin”, Elektrotehničkom i Mašinskom fakultetu iz Beograda u svetu je poznato i kao ,,Beogradska škola robotike”.
Nažalost, tokom osamdesetih i devedesetih, istraživanja robota gube na intenzitetu i čini se da srpska industrija uopšte nije bila zainteresovana za primenu ovih tehnologija, sve do druge decenije 21. veka kada ponovo hvata vezu sa mestom na kome je nekada bila. Razvojni centri najvećih svetskih kompanija koji su smešteni u Srbiji, veliki centar u Kragujevcu i još nekoliko projekata, na sreću, svedoče o povratku ove stare slave.

Beogradske priče – Ljudi, ulice, trotoari, prolazi, sudbine…


